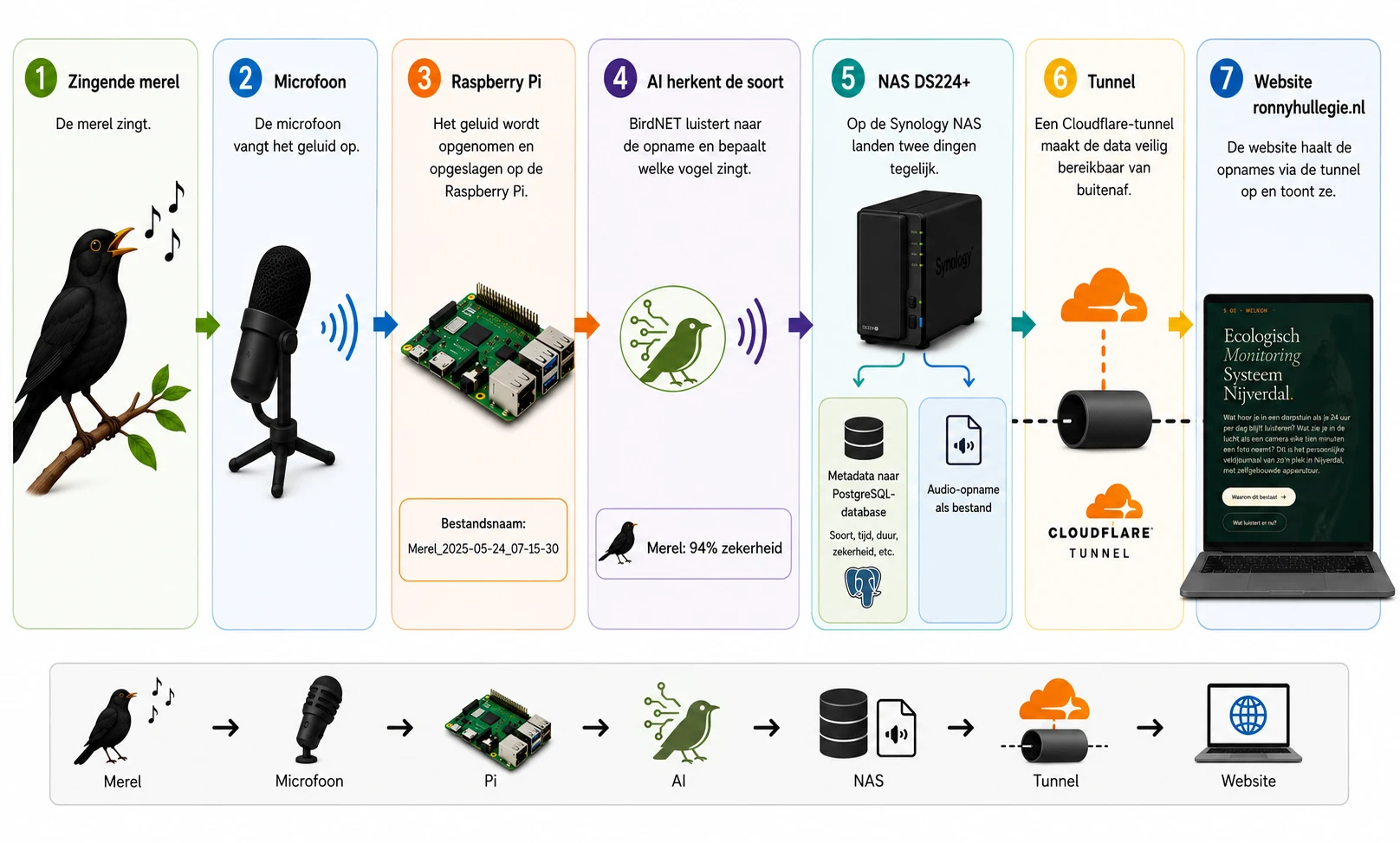
Weather
Davis Vantage Pro 2 (radio)
│
▼
Davis console, USB serial
│
▼
Pi Meteo: davis-weather-monitor.service
│
▼
MQTT publish emsn2/meteo/weather/*
│
▼
Mosquitto broker on Zolder
│
▼
weather_ingest service
│
▼
▶ PostgreSQL.weather_dataThe outdoor sensors transmit to the Davis console by radio every minute. A Pi Zero reads that console over USB, publishes to MQTT, and the NAS writes the data away.